





RHC4シリーズ マテハンロボット
説明
技術的なパラメーター
製品紹介
マテハンロボット RHC4 シリーズは 4 機種あり、アーム長 2 種類、可搬質量 3 種類を揃え、狭いスペースから広いスペースまで幅広い用途に対応します。

技術的パラメータ
産業用ロボット | RHC403 | RHC410A | RHC415 | RHC420 | |
自由度 | 4 | 4 | 4 | 4 | |
規定荷重 | 3kg | 10kg | 15kg | 20kg | |
最大作業半径 | 585ミリメートル | 1402ミリメートル | 1402ミリメートル | 2000ミリメートル | |
再現性 | ±0.02mm | ±0.05mm | ±0.05mm | ±0.08mm | |
可動範囲 | J1 | ±140度 | ±145度 | ±145度 | ±145度 |
J2 | ±180度 | ±135度 | ±135度 | ±135度 | |
J3 | 0-145mm | ±250ミリメートル | ±250ミリメートル | ±240ミリメートル | |
J4 | ±360度 | ±180度 | ±180度 | ±180度 | |
定格速度 | J1 | 225度/秒、3.95rad/秒 | 225度/秒、3.93rad/秒 | 225度/秒、3.93rad/秒 | 108度/秒, 1.88rad/sの |
J2 | 225度/秒、3.95rad/秒 | 225度/秒、3.93rad/秒 | 225度/秒、3.93rad/秒 | 148.76度/秒、2.60rad/秒 | |
J3 | 500mm/秒 | 500mm/秒 | 500mm/秒 | 500mm/秒 | |
J4 | 360度/秒、6.28rad/秒 | 180度/秒、3.14rad/秒 | 180度/秒、3.14rad/秒 | 225度/秒、3.93rad/秒 | |
最高速度 | J1 | 374度/秒、6.54rad/秒 | 300度/秒、5.23rad/秒 | 300度/秒、5.23rad/秒 | 216度/秒, 3.77ラジアン/秒 |
J2 | 375度/秒、6.54rad/秒 | 375度/秒、6.54rad/秒 | 375度/秒、6.54rad/秒 | 198度/s、3.54rad/s | |
J3 | 1000mm/秒 | 830mm/秒 | 830mm/秒 | 667mm/秒 | |
J4 | 588度/秒、10.26rad/秒 | 360度/秒、6.28rad/秒 | 360度/秒、6.28rad/秒 | 375度/秒、6.54rad/秒 | |
許容慣性モーメント | J4 | 0.03kg㎡ | 2キロ㎡ | 3キロ㎡ | 6.5キロ㎡ |
許容トルク | J4 | 6.4N·m | 40N·m | 50N·m | 90Nmの |
適用環境 | 温度 | 0-45度 | 0-45度 | 0-45度 | 0-45度 |
湿度 | 20%-80% | 20%-80% | 20%-80% | 20%-80% | |
他の | 可燃性、爆発性、腐食性のガスや液体との接触を避けてください。電子ノイズ源 (プラズマ) から遠ざけてください。 | 可燃性、爆発性、腐食性のガスや液体との接触を避けてください。電子ノイズ源 (プラズマ) から遠ざけてください。 | 可燃性、爆発性、腐食性のガスや液体との接触を避けてください。電子ノイズ源 (プラズマ) から遠ざけてください。 | 可燃性、爆発性、腐食性のガスや液体との接触を避けてください。電子ノイズ源 (プラズマ) から遠ざけてください。 | |
インストラクターのケーブルの長さ | 8メートル | 8メートル | 8メートル | 8メートル | |
本体キャビネット接続長さ | 5メートル | 6メートル | 6メートル | 6メートル | |
I/Oパラメータ | デジタル:32 入力、31 出力 (1 つは制御盤故障インジケータ出力用) | デジタル: 32 入力、31 出力 (1 つは制御盤故障インジケータ出力用) | デジタル: 32 入力、31 出力 (1 つは制御盤故障インジケータ出力用) | デジタル: 32 入力、31 出力 (1 つは制御盤故障インジケータ出力用) | |
バッテリー容量 | 0.6kVA | 2.3キロボルトアンペア | 2.8kVA | 5.6キロVA | |
定格電力 | 0.5KW | 1.8kW | 2.2キロワット | 4.5キロワット | |
定格電圧 | 単相AC220V, 50Hz | 三相AC380V | 三相AC380V | 三相AC380V | |
定格電流 | 2.5A | 3.2A | 4A | 8.1A | |
保護等級 | IP64の(IP67 オプション) | IP54 | IP54の | IP54 | |
設置方法 | 地上設置, 側面取り付け、 逆さまにインストール | 地上設置 | 地上設置 | 地上設置 | |
体重 | 25kg | 230kg | 250kg | 280kg | |
制御盤の保護等級 | IP53の | IP53 | IP53の | IP53の | |
制御盤サイズ | 620(広い)×260(厚い)×475(高い)-垂直 | 660(広い)×450(厚い)×950(高い)-垂直 | 660(広い)×450(厚い)×950(高い)-垂直 | 660(広い)×450(厚い)×950(高い)-垂直 | |
制御盤重量 | 38kg | 50kg | 50kg | 50kg | |
作業エリア
1.RHC410A
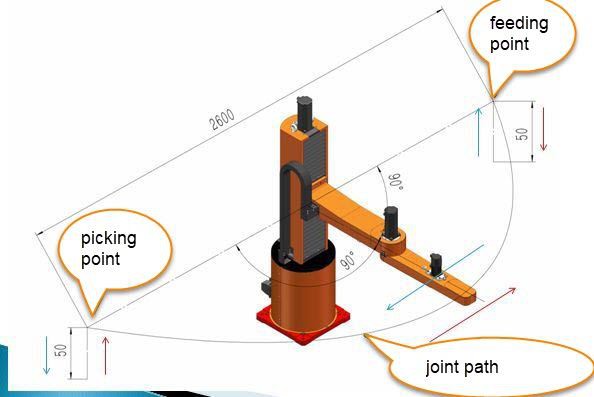
700x700 シートマテリアルハンドリング
3秒/サイクル 21.4サイクル/分
パス1:50mm→50mm→2600mm(180度)→50mm→50mm→2600mm(180度)
ワークサイズ: 700x700x0.8 亜鉛メッキ板
ワーク重量:3Kg
グリップシステム重量: 3Kg
総合慣性モーメント:1.6Kg㎡
備考
デバイスの待機時間はテスト用に設定されていません。
移行点は設定されていません。実際の使用状況に基づいて、デバイスの待機時間、吸引および排出時間、信号相互作用時間、および遷移点時間を実際の動作サイクルに追加する必要があります。
2.RHC415
1800x600 シートマテリアルハンドリング
6.1秒/サイクル 9.8サイクル/分
パス: 1000mm (90度)、500mm、50mm、50mm、500mm、1000mm (90度)、1000mm (90度)、500mm、50mm、50mm、500mm、1000mm (90度)
ワークサイズ: 1800x600x0.5 亜鉛メッキ板
ワーク+グリップシステム重量:10Kg
負荷イナーシャ:2.7Kg㎡
備考
デバイスの待機時間はテスト用に設定されていません。
移行点は設定されていません。実際の使用状況に基づいて、デバイスの待機時間、吸引および排出時間、信号相互作用時間、および遷移点時間を実際の動作サイクルに追加する必要があります。

3.RHC420
2000*1000 シートマテリアルハンドリング
7秒/サイクル 8.57サイクル/分
試験条件:
パス: 1000mm (90度)、850mm、400mm、400mm、8500mm、1000mm (90度)、1000mm (90度)、850mm、400mm、850mm、400mm、1000mm(90度)
ワークサイズ:2000*1000*0.8
ワーク+グリップシステム重量:25Kg
負荷イナーシャ:6.5Kg㎡
備考: デバイスの待ち時間はテスト用に設定されていません。移行点は設定されていません。実際の使用状況に基づいて、デバイスの待機時間、吸引および排出時間、信号相互作用時間、および遷移点時間を実際の動作サイクルに追加する必要があります。

マテハンロボットの活用事例


ある企業のシングルドア冷蔵庫のプレスプロジェクト
ロボット:RHC415(10台)
ワーク:1800×600×0.5
生産ラインの特徴:
1. 大型シートのスタンピングを実現。 6- 軸ロボットに関しては、このようなワークピースのロードとアンロード (大きな慣性) を実現するには少なくとも 50kg のロボットが必要ですが、これによりユーザーの改造コストが大幅に節約されます。
2. 生産ラインは、柔軟な生産を実現するために、3+2 の複数の生産モードを実現できます。
3. スペースは狭いですが、HCNC グループのロボットは自由に曲がることができ、多関節ロボットの利点を十分に反映しています。
4. ロボットがプレスを待つ時間のほとんどに、油圧プレスの成形時間を加えると、ライン全体のサイクルは 20 秒以内に達します。
5. 素早い金型交換を実現
人気ラベル: rhc4 シリーズ マテリアル ハンドリング ロボット、中国、メーカー、サプライヤー、工場、購入、安い、低価格、販売のため
次条
無お問い合わせを送る
あなたはおそらくそれも好きでしょう



